工业机械手臂_工业机械手臂的结构及分类
工业机械手臂是拟人手臂、手腕和手功能 的机械电子装置。
工业机械手臂是拟人手臂、手腕和手功能的机械电子装置。拟人手臂、手腕和手功能的机械电子装置;它可把任一物件或工具按空间位姿(位置和姿态)的时变要求进行移动,从而完成某一工业生产的作业要求。

如夹持焊钳或焊枪,对汽车或摩托车车体进行了点焊或弧焊;搬运压铸或冲压成型的零件或构件;进行激光切割;喷涂;装配机械零部件等等。
工业机械手臂是一种仿生机电设备,能模拟人手动作通过改变目标物体的位姿来实现作业。可完成搬运、焊接、切割、喷涂及装配等工作。
工业机械手臂操作可控,可实现人机交互,用途比较广泛。由于工业机械臂的结构特点,整体架构属于费力杠杆,并且传动齿轮间隙的存在也会降低机械臂的刚度及运动精度。
因此提高机械手臂的负载能力、提高整体刚度及降低驱动能耗成了机械臂性能提升的关键问题。
机械臂结构设计:
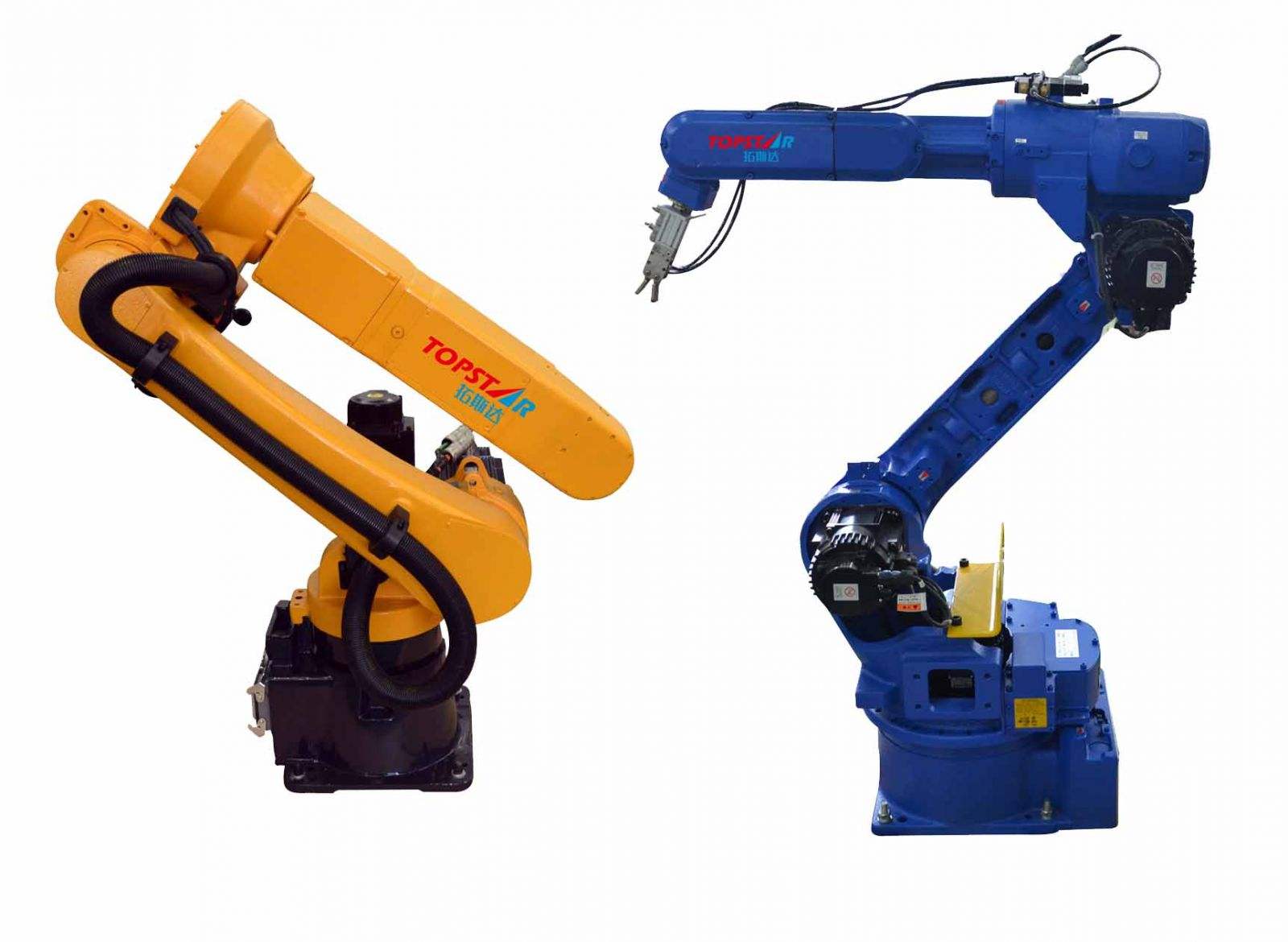
工业机械手臂的主要部件包括回转部、大臂、小臂及腕部。回转部可完成整机的回转运动,大臂和小臂的配合运动可实现机械臂末端的空间位置移动,腕部能实现俯仰轴与摆轴两个动作。各部件的运动配合实现机械臂设定的运动轨迹。
大臂、小臂结构:
大臂由平衡缸、电动缸及大臂梁组成,小臂由电动缸II、平衡缸II及小臂梁组成,均为平行四边形框架结构构形式,电动缸安装在各自的对角线上,电动缸由关节电机、离合器、丝杠、推杆及缸体等零部件组成。
端部的关节电机通过离合器带动丝杠旋转,丝杠上的螺母驱动推杆伸缩,推杆的伸缩带动四边形框架夹角的变化,从而实现机械臂的水平和竖直方向的移动。
机械手臂回转部结构:
回转部由伺服电机、涡轮、蜗杆、回转支撑、回转轴、立柱、箱体等零部件组成。为了平衡涡轮的侧向推力及消除涡轮与蜗杆之间的间隙。蜗杆采用对称布置的形式。
工业机械臂目前还没有统一的分类标准。根据不同的要求可进行不同的分类。
按驱动方式分
1.液压式
液压驱动机械臂通常由液动机(各种油缸、油马达)、伺服阀、油泵、油箱等组成驱动系统,由驱动机械臂的执行机构进行工作。
通常它具有很大的抓举能力(高达几百公斤以上),其特点是结构紧凑,动 作平稳,耐冲击,耐振动,防爆性好,但液压元件要求有较高的制造精度和密封性能,否则漏油将污染环境。
2.气动式
其驱动系统通常由气缸、气阀、气罐和空压机组成,其特点是气源方便,动作迅速、结构简单、造价较低、维修方便。但难以进行速度控制,气压不可太高,故抓举能力较低。
3.电动式
电力驱动是目前机械臂使用得最多的一种驱动方式。其特点是电源方便,响应快,驱动力较大(关节型的持重已达400公斤),信号检测、传递、处理方便,并可以采用多种灵活的控制方案。
驱动电机一般采用步进电机,直流伺服电机以及交流伺服电机(其中交流伺服电机为目前主要的驱动形式)。由于电机速度高,通常采用减速机构(如谐波传动、RV摆线针轮传动、齿轮传动、螺旋行动和多杆式机构等)。
目前,有些机械臂已开始采用无减速机构的大转矩、低转速的电机进行直接驱动(DD),这既可以使机构简化,又可提高控制精度。
以上就是关于工业机械手臂的结构及分类介绍,更多资讯请关注本站WAM机械网!
版权声明
本文仅代表作者观点,不代表本站立场。
本文来自网络,如有侵权及时联系本网站。