工业机械手设计_工业机械手设计说明
工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备。
工业机械手设计是机械制造、机械设计等方面的一个重要的环节。工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
因而具有强大的生命力受到人们的广泛重视和欢迎。实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。
工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
机械手的座标型式与自由度:
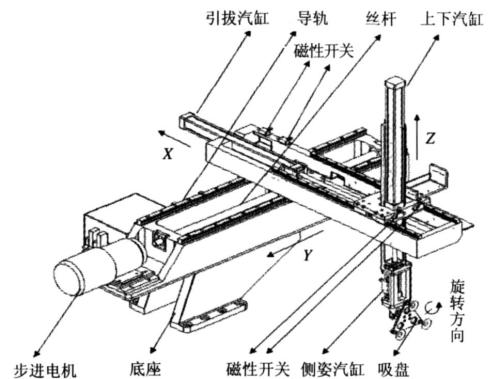
按机械手手臂的不同运动形式及其组合情况,其座标型式可分为直角座标式、圆柱座标式、球座标式和关节式。由于本机械手在上下料时手臂具有升降、伸缩、夹紧与松开、旋转及左右回转运动,因此,采用圆柱座标型式。相应的机械手具有五个自由度。
机械手的手部结构方案设计:
为了使机械手更好地夹持物料,将其手部设计成类似V字形状,这样就能更稳固地夹住棒状产品(如保温杯)。
机械手的手腕结构方案设计:
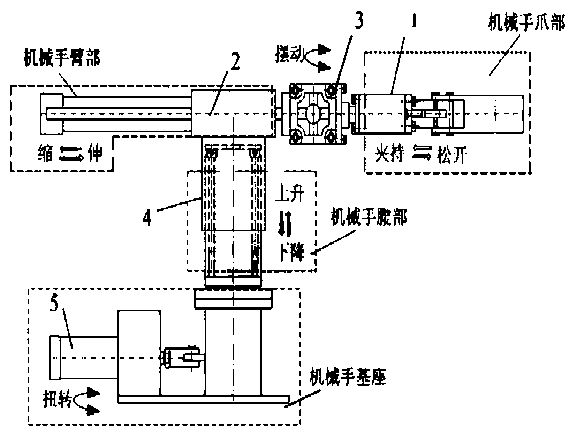
考虑到机械手的通用性,同时由于被抓取工件是水平放置,因此手腕必须设有回转运动才可满足工作的要求。因此,手腕设计成回转结构,实现手腕回转运动的机构为回转液压缸。
机械手的手臂结构方案设计:
按照抓取工件的要求,本机械手的手臂有两个自由度,即左右回转和升降。手臂的回转和升降运动是通过立柱来实现的,手臂的各种运动由液压缸来实现。
机械手的驱动方案设计:
由于液压传动系统的动作迅速,反应灵敏,阻力损失和泄漏较小,成本低廉因此本机械手采用液压传动方式。
机械手的控制方案设计:
考虑到机械手的通用性,同时使用点位控制,因此我们采用可编程序控制器(PLC)对机械手进行控制。当机械手的动作流程改变时,只需改变PLC程序即可实现,非常方便快捷。
机械手的主要技术参数:
1.机械手的最大抓重是其规格的主参数,由于是采用液压方式驱动,因此考虑抓取的物体不应该太重,查阅相关机械手的设计参数,结合工业生产的实际情况,本设计设计抓取的工件质量为2.5公斤。
2.基本参数运动速度是机械手主要的基本参数。操作节拍对机械手速度提出了要求,设计速度过低限制了它的使用范围。而影响机械手动作快慢的主要因素是手臂伸缩及回转的速度。
该机械手最大移动速度设计为sm/0.1。最大回转速度设计为s/90。平均移动速度为sm/8.0。平均回转速度为s/60。机械手动作时有启动、停止过程的加、减速度存在,用速度一行程曲线来说明速度特性较为全面,因为平均速度与行程有关,故用平均速度表示速度的快慢更为符合速度特性。
除了运动速度以外,手臂设计的基本参数还有伸缩行程和工作半径。根据统计和比较,该机械手手臂的伸缩行程定为600mm,最大工作半径约为1400mm。手臂升降行程定为120mm。定位精度也是基本参数之一。该机械手的定位精度为1mm。
以上就是关于工业机械手设计说明的介绍,更多资讯请关注本站WAM机械网!
版权声明
本文仅代表作者观点,不代表本站立场。
本文来自网络,如有侵权及时联系本网站。